이전에 직장에서 computational geometry study를 가진적이 있다.
그때 알게된 문제인데 skyline problem이라고 하는 유명한 문제가 leetcode에도 있어서 이 문제를 풀고 개선하려고 정리했던 적이 있다.
정리해두고 잊고 있었는데, 블로그에 올려두려 한다.
문제 설명
먼저 skyline problem 문제 정의는 위 leetcode에서 명확히 알 수 있다. 간단하게는 빌딩이 여러개 겹쳐있을때, 하늘의 선이 어떻게 될지 찾으라는 문제인데 시간 복잡도를 줄이는게 핵심인 문제다.
기존 해법
보통 PS 에서 요구되는 입력 범위와 알고리즘은 O(n log n)을 요구한다.
대부분의 해법을 찾아보면 priority queue를 활용한 방법이나, divide and merge 로 풀 수 있다.
- segments에는 건물의 x 값과 건물 index를 pair로 넣고 정렬한다. (시작점과 끝점의 x 모두)
- priority queue에 높이와 건물이 끝나는 x 좌표를 같이 저장한다. (이때 우선순위는 높이, x좌표 큰 순)
- x 순으로 segment를 도는 loop.
- 현재 seg에 저장된 x 값이 현재 event x와 같을 동안 다음 seg로 반복한다. (같은 x 좌표에 여러 building이 겹칠때)
- 현재 seg에 저장된 건물의 시작 x값이 현재 event x와 같으면 높이와 끝 x 값을 pq에 추가한다.
- pq에 들어있는 top부터 이미 event x 가 건물의 끝점을 지나간 것들은 pq에서 pop
- pq의 top에서 현재 높이를 얻는다. (이때 pq가 비어있으면 0이 되도록 설정)
- 이 높이가 이미 skyline의 마지막 값과 다른 경우만 event x 와 그 높이를 추가해준다. (같으면 이어져야함)
- 현재 seg에 저장된 x 값이 현재 event x와 같을 동안 다음 seg로 반복한다. (같은 x 좌표에 여러 building이 겹칠때)
// find skyline given building segments in O(n log n)
std::vector<std::vector<int>> GetSkylineSlow(
std::vector<std::vector<int>>& buildings) {
std::vector<std::vector<int>> skyline;
std::vector<std::pair<int, int>> segs;
segs.reserve(buildings.size());
for (int i = 0; i < buildings.size(); i++) {
const auto& b = buildings[i];
segs.push_back({b[0], i});
segs.push_back({b[1], i});
}
std::sort(segs.begin(), segs.end());
std::priority_queue<std::pair<int, int>> pq;
int seg_idx = 0;
while (seg_idx < segs.size()) {
int cur_x;
std::tie(cur_x, std::ignore) = segs[seg_idx];
while (seg_idx < segs.size() && cur_x == segs[seg_idx].first) {
int building_idx;
std::tie(std::ignore, building_idx) = segs[seg_idx];
const auto& b = buildings[building_idx];
if (b[0] == cur_x) {
pq.push({b[2], b[1]});
}
seg_idx++;
}
// remove immediately as it ends
while (!pq.empty() && pq.top().second <= cur_x) {
pq.pop();
}
int cur_height = 0;
if (!pq.empty()) {
cur_height = pq.top().first;
}
if (skyline.empty() || skyline.back()[1] != cur_height) {
skyline.push_back({cur_x, cur_height});
}
}
return skyline;
}
다음은 고려할 corner case등을 생각한 과정이다.
개선 알고리즘
이 문제를 시간복잡도 O(n log h)에 풀수 있다는 정보를 study중 알게되었는데, 이때 h는 output으로 나오는 skyline의 point 수이다. 이런 알고리즘을 output-sensitive 알고리즘 이라고 하는데, 계산기하학 분야에서 자주 나온다.
output의 수가 적게 예상되는 상황에서 효율적인 방식인데, skyline problem도 빌딩의 수 n이 매우 커지면 겹치는 부분들로 인해 최종 skyline의 수는 적을것으로 예상할만한 상황이다.
아이디어
이 output-sensitive한 알고리즘의 대표적인 방식으로 convex hull 을 찾는 Chan’s algorithm 이 있는데, 이와 유사한 아이디어로 문제를 접근하기로 했다.
- 최종 skyline의 수를 h라고 하고, 이 값은 알 수 없으므로 먼저 h*라고 guess한다.
- 그다음 각 building을 h*개씩 묶어서 k개의 그룹을 만든다.
- 각 그룹에서 skyline을 찾는다. (이전의 우선순위 큐 방식 사용)
- O(k x (h* log h)) = O(n log h)
- 각 그룹에서 ray query를 할 수 있는 구조를 구축한다.
- O(k x (h* log h*))
- 각 그룹의 skyline을 하나로 합친다.
- 시작점에서 모든 k개의 그룹으로 query를 날려서 가장 가까운 segment로 이동한다.
- O(k x log h*)
- 이 query 후 이동 과정을 한번 하면 최종 skyline의 점 하나를 얻으므로, h 번 반복하면 정답을 얻어야 한다. guess했던 h*가 h 보다 크거나 같다면 어쨌든 정답을 찾을 수 있다.
- O(n log h*)
- 시작점에서 모든 k개의 그룹으로 query를 날려서 가장 가까운 segment로 이동한다.
- 이제 이 h*를 작은 값에서부터 늘리면서 정답을 찾을 수 있을때까지 늘리면 된다.
- 이 늘리는 방식은 2^(2^i) 형태로 늘리는데, 이렇게 늘려야 모든 합을 계산했을 때, O(n log h)를 달성할 수 있다.
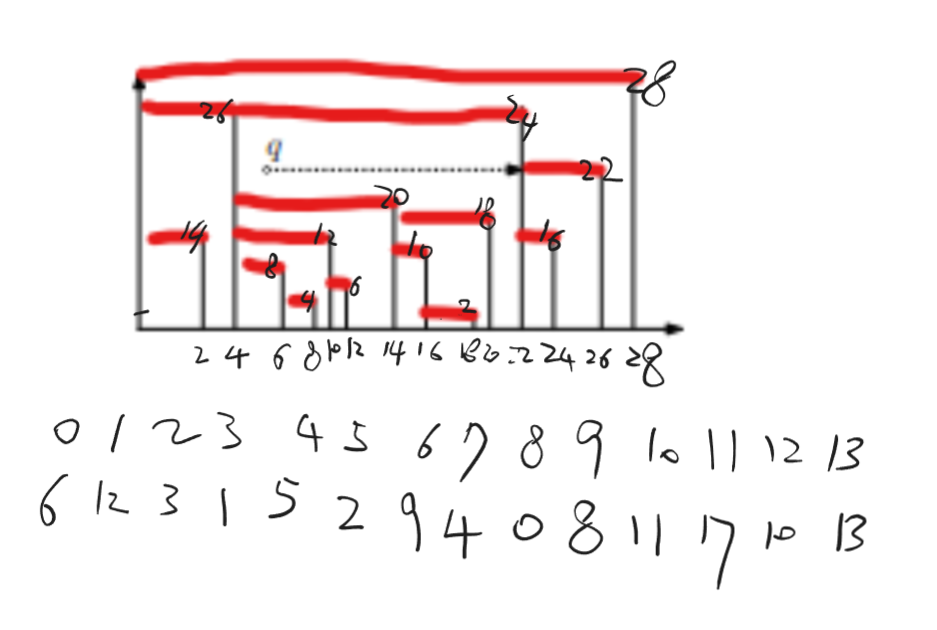
이 query는 다음과 같이 한 점에서 수평선으로 ray를 쐈을 때, 어떤 vertical segment와 먼저 만나는지 반환해야하는데, O(log n)의 시간복잡도를 보장해야하고, 구축할때 O(n log n)의 시간복잡도를 만족해야 한다.
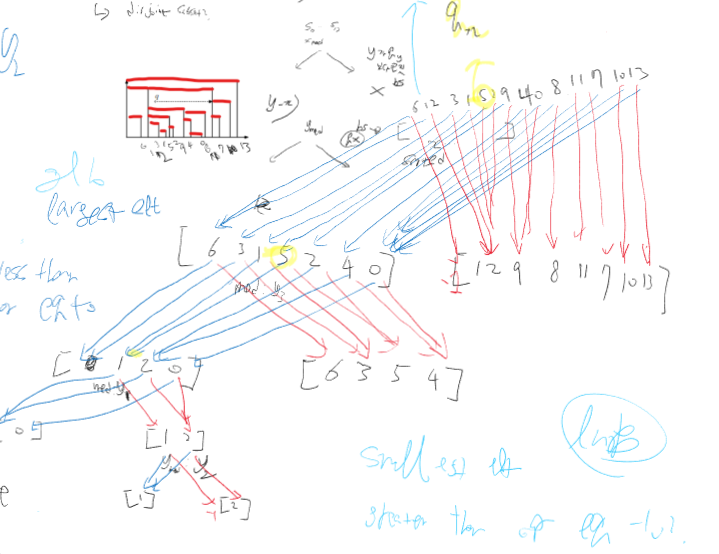
range tree나, kd tree 등 여러 tree 구조의 데이터를 구축해야 탐색 시 시간복잡도를 만족할 것으로 생각하고 조사해봤다.
결국 선택한 방식은 y좌표로 한번, x좌표로 한번 두개의 binary search를 하도록 구성하는 방식인데, 이를 구성할 때 시간을 줄이기 위해 fractional cascading 기법을 사용했다.
query 과정을 나타낸 모식도이며 세부 알고리즘은 구현 코드와 주석으로 대체하려한다.
구현
초기 구현 결과로 복잡한 예시를 넣어봤다. 오류가 몇가지 있었는데 수정한 내용이다.
- next sub group point exist 중 drop 조건
- 그후 prev로 drop하기 전에, current next y로 self drop이 더 높으면 drop하지 않도록 조건을 변경
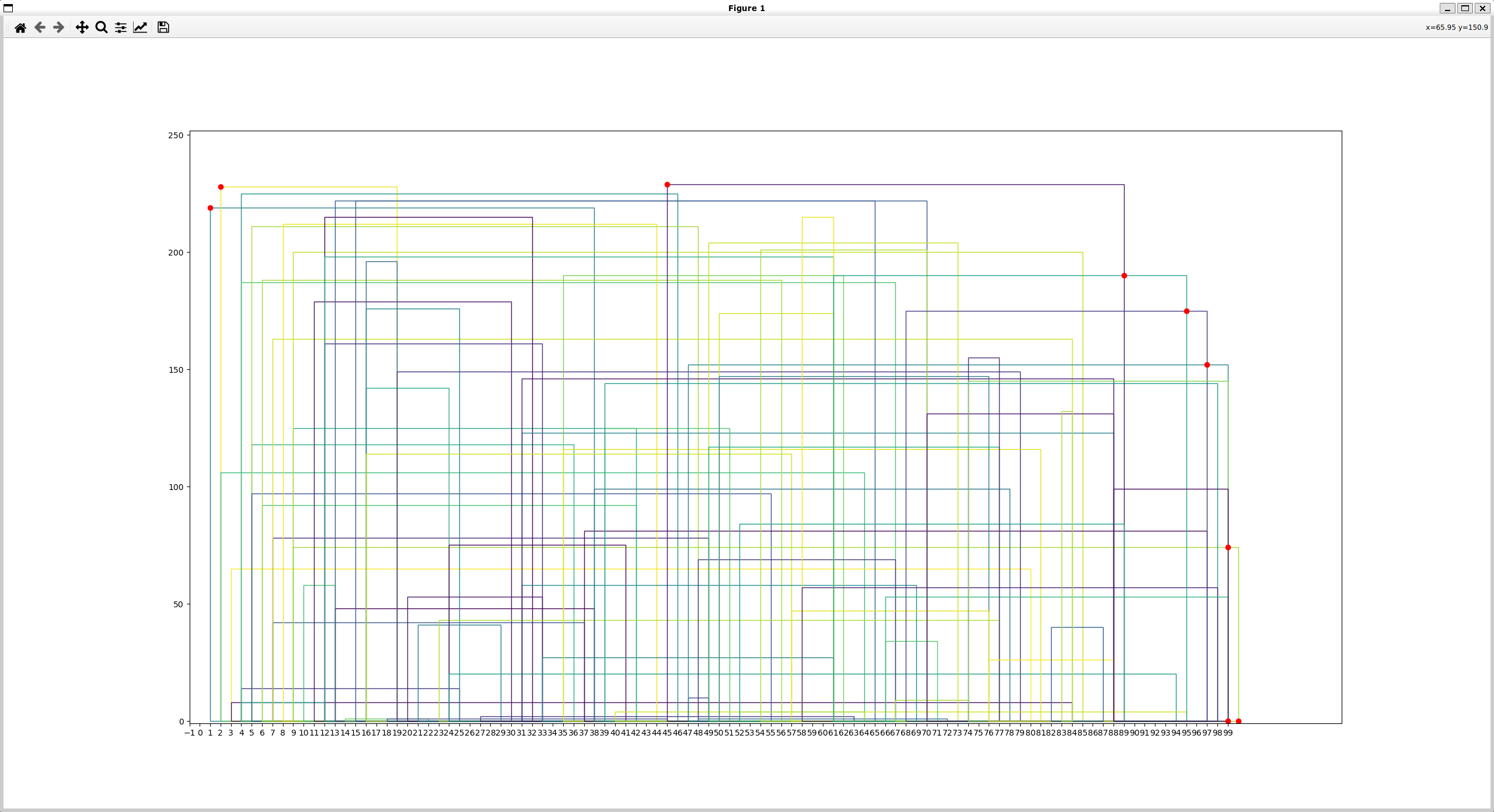
해당 이슈를 수정한 후 원하는 결과를 얻었다.
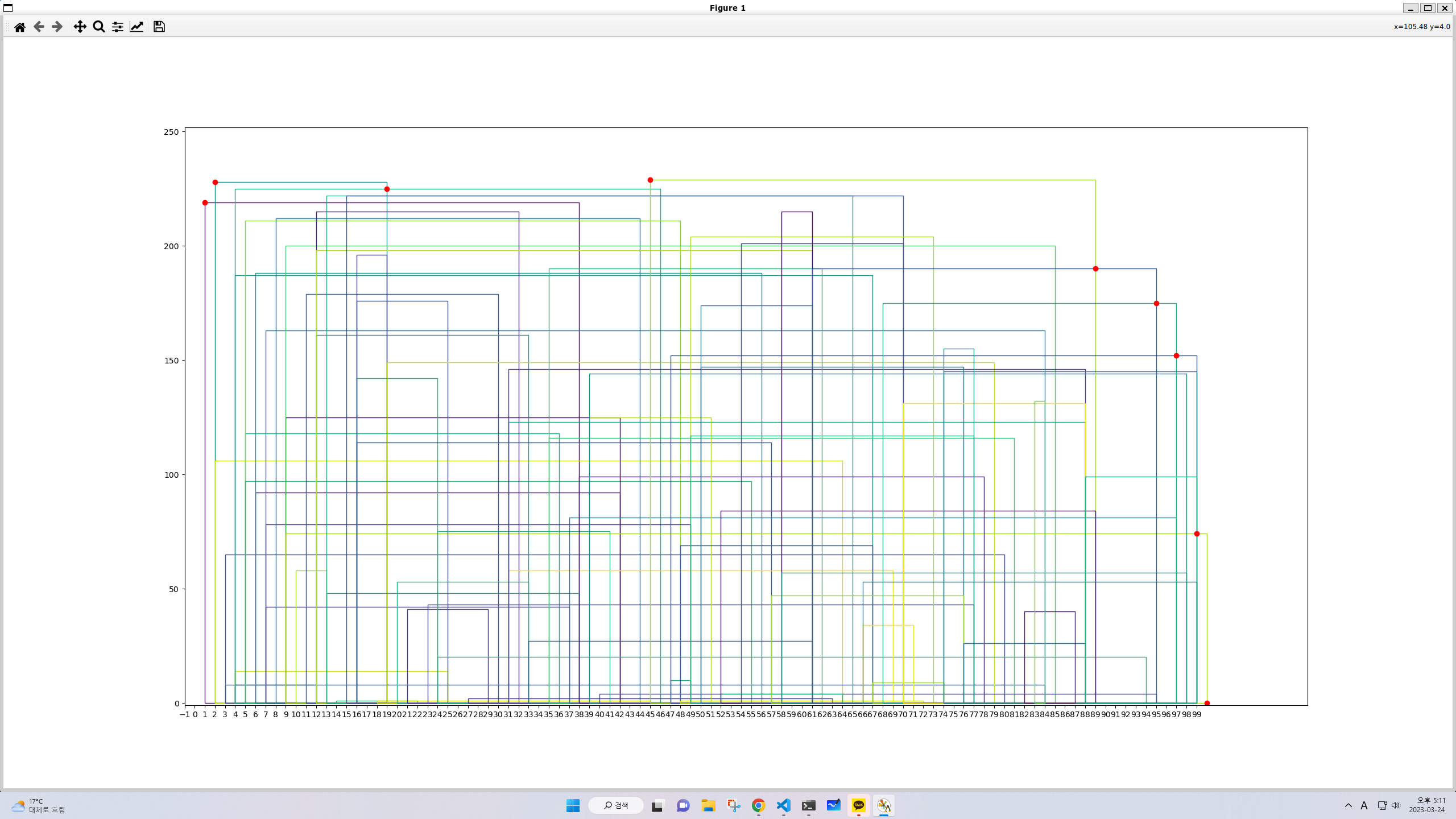
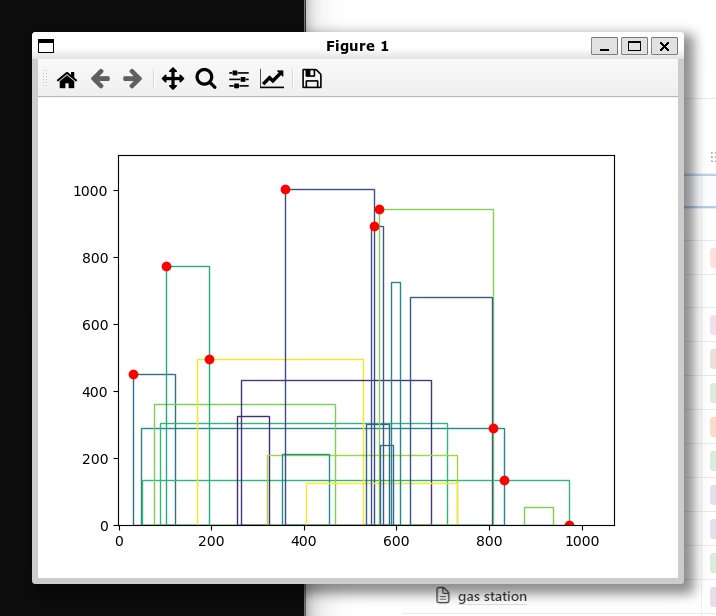
보기 편하게 20개 건물로 확인한 결과이다.
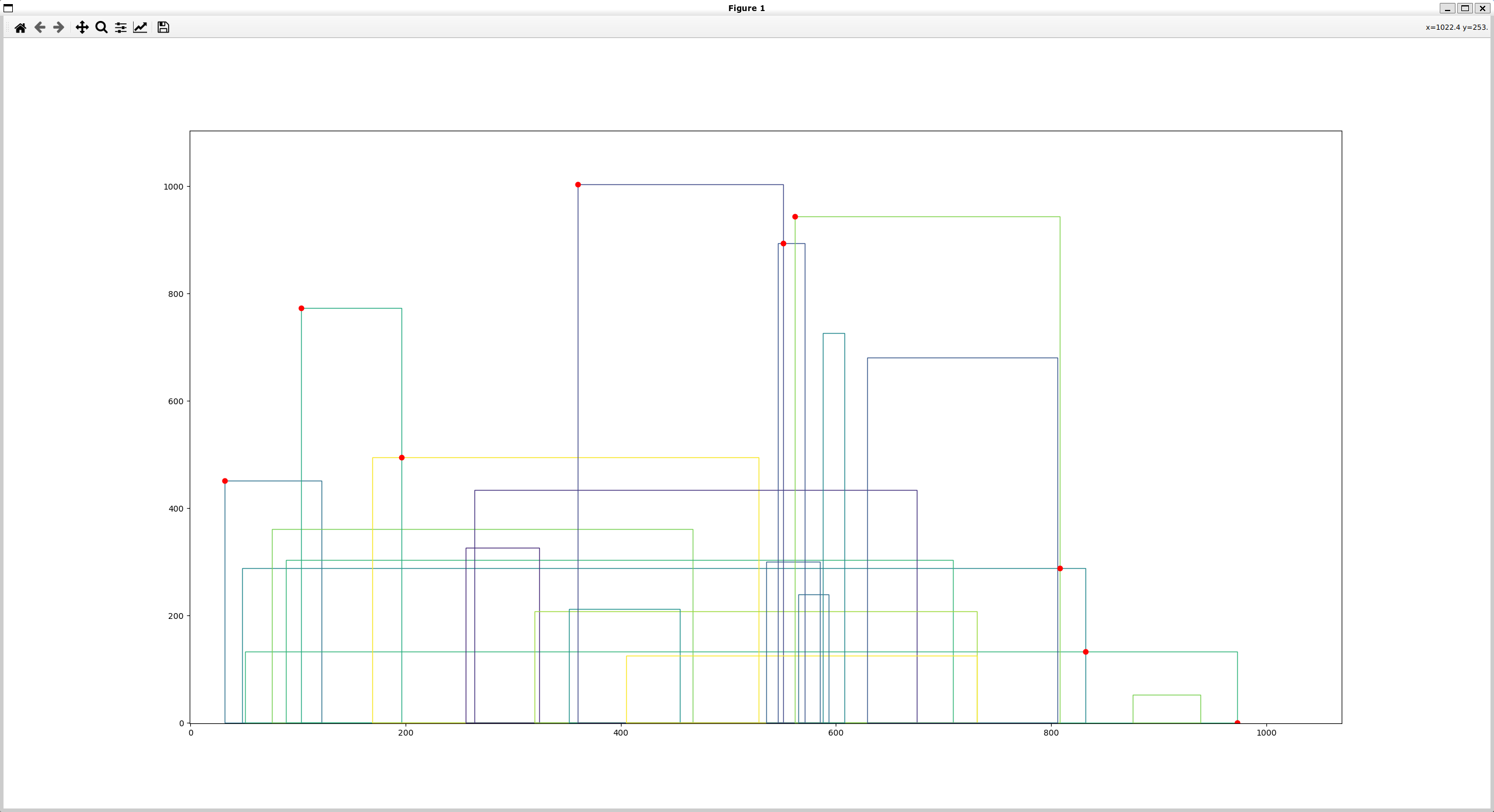
구현과정에서는 테스트 케이스를 하나씩 추가해가며 각 기능의 구현완료를 확인하고 넘어갔다.
검증 및 시각화
가장 먼저 시각화 코드를 작성해서 눈으로 결과의 오류를 확인하고 수정할 부분을 건드렸다.
그 이후 각 부분별로 실행시간을 확인했다.
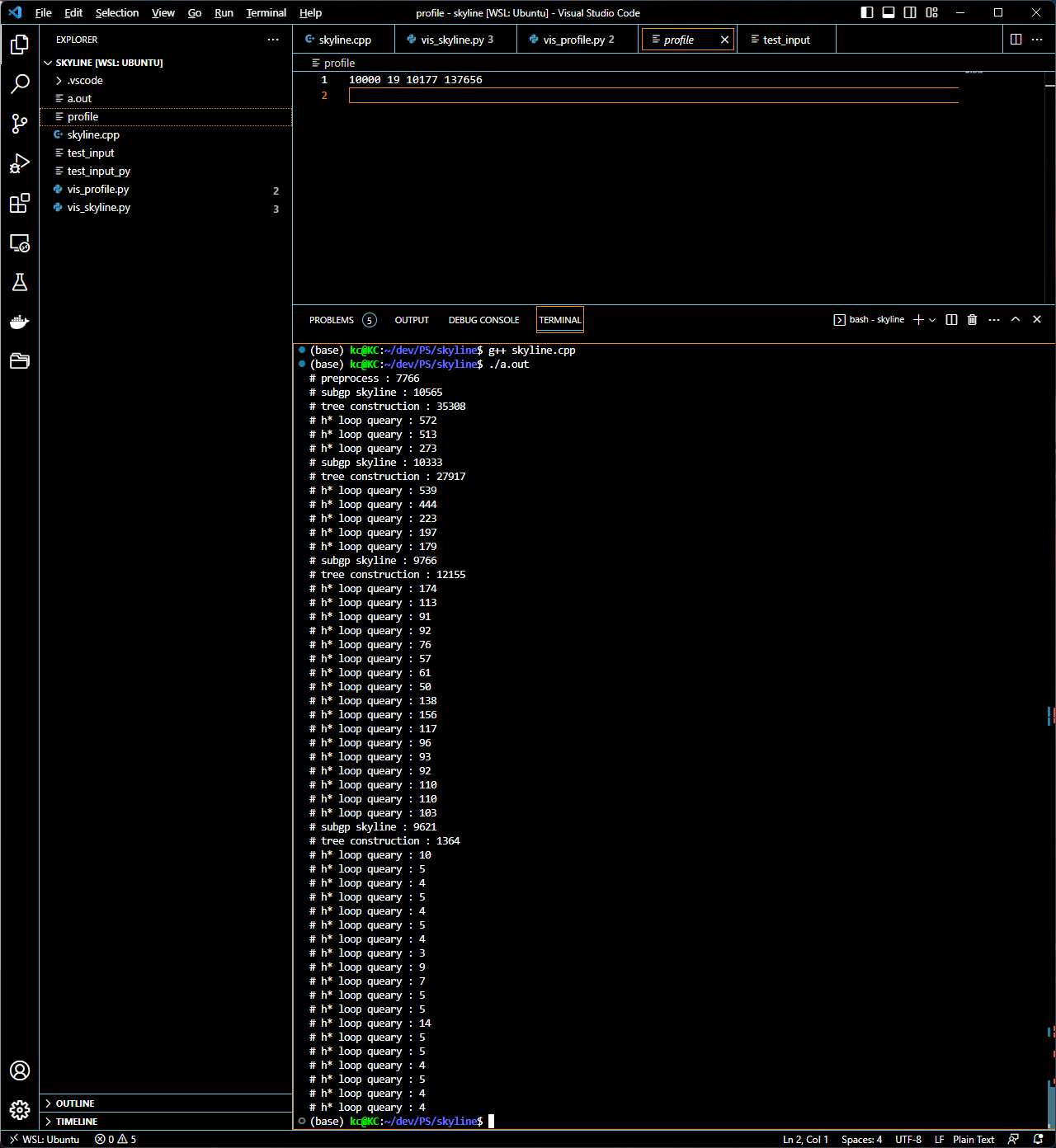
- preprocess는 O(n)이 예상되는 부분인데 조금 오래걸린것으로 보고, copy 최적화로 절반 가량 줄였다.
- subgp skyline 시간 총합
- 각 query tree 구축 시간
- 이부분이 가장 시간을 많이 쓰고 있어서 최적화의 여지가 있지만 남겨두었다.
- h* loop의 각각 query 시간
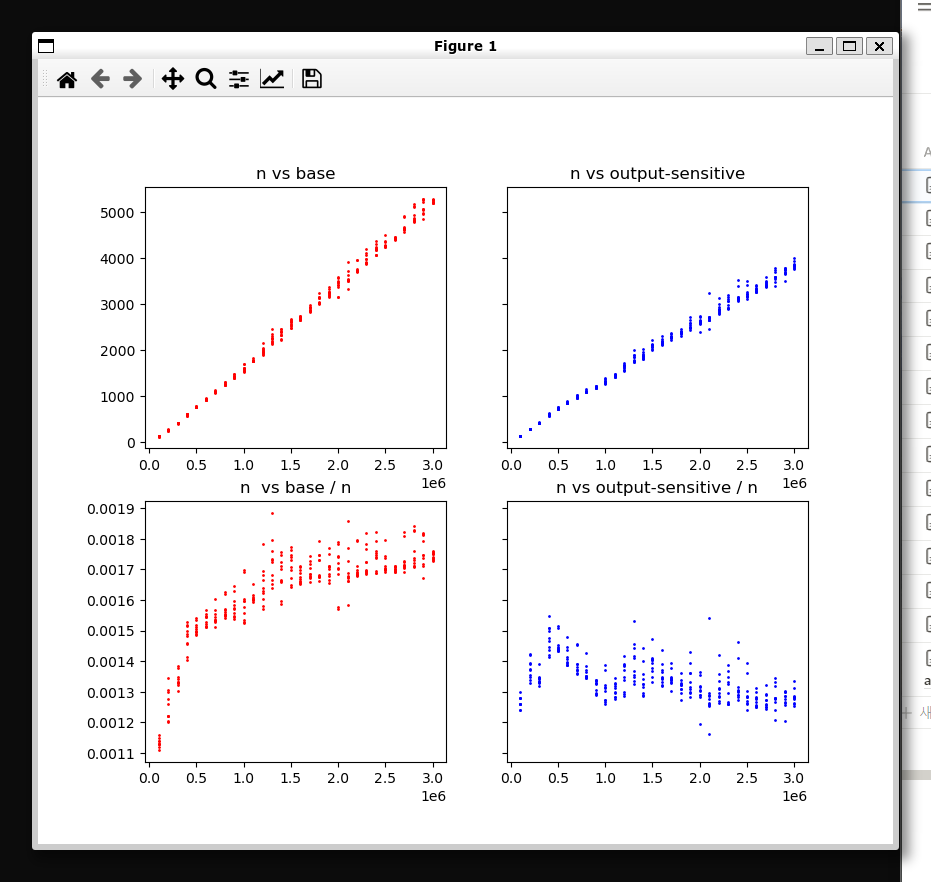
이후에는 n을 키워가며 기존의 알고리즘과 제안한 알고리즘의 시간이 얼마나 걸리는지 측정했다.
n의 범위가 작을때는 priority queue 방식이 더 빨랐지만, n이 10^6을 넘어가면서부터는 개선된 시간을 보였다. 이 n은 최적화를 통해 더 줄일 수 있을 것으로 판단했다.
하지만 이런 asymptotic analysis 자체가 practical 한 측면 보다는 theoretical한 분석위주이기 때문에, 실제 알고리즘에는 불필요한 constant term을 줄일필요가 있을 것이다. 참고로 leetcode에서 제공되는 n의 최대값은 10^4으로 기존 알고리즘이 더 나은 성능을 보이는데, 여러 이론상 빠른 알고리즘들도 구현상 복작도나, n이 작은 경우 느려서 쓰이지 않는 케이스가 많이 있기때문에 큰 문제는 아니라고 생각했다.
코드 자료
전체 알고리즘과 테스트 코드, 프로파일링 코드
#include <algorithm>
#include <chrono>
#include <cmath>
#include <fstream>
#include <iostream>
#include <queue>
#include <random>
#include <sstream>
#include <tuple>
#include <unordered_map>
#include <vector>
class Node {
public:
Node* left;
Node* right;
int y_med;
std::vector<int> x_sorted_idx;
std::vector<int> left_x_cascading_map;
std::vector<int> right_x_cascading_map;
std::vector<int> left_x_cascading_map_inverse;
std::vector<int> right_x_cascading_map_inverse;
Node(int y_med_, const std::vector<int>& x_sorted_idx_)
: y_med(y_med_), x_sorted_idx(x_sorted_idx_) {
left = nullptr;
right = nullptr;
}
};
class Tree {
public:
Node* root;
const std::vector<std::vector<int>>& pts;
std::vector<int> x_sorted_idx;
std::vector<int> y_sorted_idx;
std::vector<int> idx_to_y_order;
int td1, td2, td3, td4, td5, td6;
Tree(const std::vector<std::vector<int>>& pts_) : pts(pts_) {
// TODO: remove O(n) copys using only sort.
std::chrono::high_resolution_clock::time_point begin;
std::chrono::high_resolution_clock::time_point end;
std::chrono::high_resolution_clock::time_point tp0;
std::chrono::high_resolution_clock::time_point tp1;
std::chrono::high_resolution_clock::time_point tp2;
int time_diff;
begin = std::chrono::high_resolution_clock::now();
// std::vector<std::tuple<int, int, int>> indexed_xy;
// indexed_xy.reserve(pts_.size());
// for (int i = 0; i < pts.size(); i++) {
// indexed_xy.emplace_back(i, pts[i][0], pts[i][1]);
// }
// std::sort(indexed_xy.begin(), indexed_xy.end(),
// [](const auto& a, const auto& b) {
// int a_x;
// std::tie(std::ignore, a_x, std::ignore) = a;
// int b_x;
// std::tie(std::ignore, b_x, std::ignore) = b;
// return a_x < b_x;
// });
// x_sorted_idx.reserve(pts_.size());
// for (const auto& item : indexed_xy) {
// int idx;
// std::tie(idx, std::ignore, std::ignore) = item;
// x_sorted_idx.push_back(idx);
// }
x_sorted_idx.reserve(pts_.size());
// y_sorted_idx.reserve(pts_.size());
for (int i = 0; i < pts_.size(); i++) {
x_sorted_idx.push_back(i);
// y_sorted_idx.push_back(i);
}
// x_sorted_idx.resize(pts_.size());
// std::iota(x_sorted_idx.begin(), x_sorted_idx.end(), 0);
tp0 = std::chrono::high_resolution_clock::now();
y_sorted_idx.reserve(pts_.size());
for (int i = 0; i < pts_.size(); i++) {
y_sorted_idx.push_back(i);
}
tp1 = std::chrono::high_resolution_clock::now();
std::stable_sort(
y_sorted_idx.begin(), y_sorted_idx.end(),
[&pts_](int i1, int i2) { return pts_[i1][1] < pts_[i2][1]; });
// std::stable_sort(indexed_xy.begin(), indexed_xy.end(),
// [](const auto& a, const auto& b) {
// int a_y;
// std::tie(std::ignore, std::ignore, a_y) = a;
// int b_y;
// std::tie(std::ignore, std::ignore, b_y) = b;
// return a_y < b_y;
// });
tp2 = std::chrono::high_resolution_clock::now();
// y_sorted_idx.reserve(pts_.size());
// idx_to_y_order.resize(indexed_xy.size());
// for (int i = 0; i < indexed_xy.size(); i++) {
// int idx;
// std::tie(idx, std::ignore, std::ignore) = indexed_xy[i];
// idx_to_y_order[idx] = i;
// y_sorted_idx.push_back(idx);
// }
idx_to_y_order.resize(y_sorted_idx.size());
for (int i = 0; i < y_sorted_idx.size(); i++) {
idx_to_y_order[y_sorted_idx[i]] = i;
}
end = std::chrono::high_resolution_clock::now();
td1 = std::chrono::duration_cast<std::chrono::milliseconds>(end - begin)
.count();
td3 = std::chrono::duration_cast<std::chrono::milliseconds>(tp0 - begin)
.count();
td4 = std::chrono::duration_cast<std::chrono::milliseconds>(tp1 - tp0)
.count();
td5 = std::chrono::duration_cast<std::chrono::milliseconds>(tp2 - tp1)
.count();
td6 = std::chrono::duration_cast<std::chrono::milliseconds>(end - tp2)
.count();
begin = std::chrono::high_resolution_clock::now();
root = ConstructTree(x_sorted_idx, 0, pts.size() - 1);
end = std::chrono::high_resolution_clock::now();
td2 = std::chrono::duration_cast<std::chrono::milliseconds>(end - begin)
.count();
}
Node* ConstructTree(const std::vector<int>& x_sorted_idx_, int y_idx_left,
int y_idx_right) {
// TODO: remove x_sorted_idx_ parameter using y indices
int y_idx_med = (y_idx_left + y_idx_right + 1) / 2;
int y_med = pts[y_sorted_idx[y_idx_med]][1];
int n = x_sorted_idx_.size();
// std::cout << "Tree Construction [" << y_idx_left << " ~ " << y_idx_right
// << "]" << std::endl;
// std::cout << "y med: " << y_med << std::endl;
// for (const auto& idx : x_sorted_idx_) {
// std::cout << "(" << pts[idx][0] << ", " << pts[idx][1] << ") - ";
// }
// std::cout << std::endl;
Node* node = new Node(y_med, x_sorted_idx_);
if (y_idx_left == y_idx_right) {
return node;
}
std::vector<int> x_sorted_idx_left;
x_sorted_idx_left.reserve(n);
std::vector<int> x_sorted_idx_right;
x_sorted_idx_right.reserve(n);
std::vector<int>& left_x_cascading_map = node->left_x_cascading_map;
left_x_cascading_map.reserve(n);
std::vector<int>& right_x_cascading_map = node->right_x_cascading_map;
right_x_cascading_map.reserve(n);
std::vector<int>& left_x_cascading_map_inverse =
node->left_x_cascading_map_inverse;
left_x_cascading_map_inverse.reserve(n);
std::vector<int>& right_x_cascading_map_inverse =
node->right_x_cascading_map_inverse;
right_x_cascading_map_inverse.reserve(n);
int left_cnt = 0;
int right_cnt = 0;
int left_cnt_inverse = -1;
int right_cnt_inverse = -1;
// 0~size
for (int i = 0; i < x_sorted_idx_.size(); i++) {
left_x_cascading_map.push_back(left_cnt);
right_x_cascading_map.push_back(right_cnt);
int y_order_i = idx_to_y_order[x_sorted_idx_[i]];
if (y_order_i < y_idx_med) {
x_sorted_idx_left.push_back(x_sorted_idx_[i]);
left_cnt++;
left_cnt_inverse++;
} else {
x_sorted_idx_right.push_back(x_sorted_idx_[i]);
right_cnt++;
right_cnt_inverse++;
}
left_x_cascading_map_inverse.push_back(left_cnt_inverse);
right_x_cascading_map_inverse.push_back(right_cnt_inverse);
}
Node* left_node =
ConstructTree(x_sorted_idx_left, y_idx_left, y_idx_med - 1);
Node* right_node =
ConstructTree(x_sorted_idx_right, y_idx_med, y_idx_right);
node->left = left_node;
node->right = right_node;
// node->left_x_cascading_map = left_x_cascading_map;
// node->right_x_cascading_map = right_x_cascading_map;
// node->left_x_cascading_map_inverse = left_x_cascading_map_inverse;
// node->right_x_cascading_map_inverse = right_x_cascading_map_inverse;
return node;
}
int QueryRight(int qx, int qy) const {
Node* node = root;
int bound_x_sorted_idx = LowerBound(x_sorted_idx, qx);
// if (bound_x_sorted_idx < x_sorted_idx.size() &&
// x_sorted_idx[bound_x_sorted_idx] == qx) {
// bound_x_sorted_idx = UpperBound(x_sorted_idx, qx) + 1;
// }
int closest_right_idx = -1;
while (node->left != nullptr && node->right != nullptr) {
// std::cout << "----------------" << std::endl;
// std::cout << "y med: " << node->y_med << std::endl;
// std::cout << "lower_bound idx: " << bound_x_sorted_idx <<
// std::endl; std::cout << "x_sorted_idx : \n\t"; for (const auto& idx :
// node->x_sorted_idx) {
// std::cout << idx << " ";
// }
// std::cout << std::endl;
// std::cout << "left_cascading_map : \n\t";
// for (const auto& cascading_idx : node->left_x_cascading_map) {
// std::cout << cascading_idx << " ";
// }
// std::cout << std::endl;
// std::cout << "left->x_sorted_idx : \n\t";
// for (const auto& idx : node->left->x_sorted_idx) {
// std::cout << idx << " ";
// }
// std::cout << std::endl;
// std::cout << "right_cascading_map : \n\t";
// for (const auto& cascading_idx : node->right_x_cascading_map) {
// std::cout << cascading_idx << " ";
// }
// std::cout << std::endl;
// std::cout << "right->x_sorted_idx : \n\t";
// for (const auto& idx : node->right->x_sorted_idx) {
// std::cout << idx << " ";
// }
// std::cout << std::endl;
// std::cout << "left 1, right 0 : " << (qy <= node->y_med) <<
// std::endl; std::cout << "closest_right_idx : " << closest_right_idx
// << std::endl;
if (bound_x_sorted_idx >= node->x_sorted_idx.size()) {
break;
}
// NOTE
// qy 랑 같은 y 에 멈출지 말지? (output sensitive 관련)
if (qy < node->y_med) {
int found_higher_x_sorted_idx =
node->right_x_cascading_map[bound_x_sorted_idx];
if (found_higher_x_sorted_idx < node->right->x_sorted_idx.size()) {
int found_higher_idx =
node->right->x_sorted_idx[found_higher_x_sorted_idx];
if (closest_right_idx == -1) {
closest_right_idx = found_higher_idx;
} else if (pts[found_higher_idx][0] < pts[closest_right_idx][0]) {
closest_right_idx = found_higher_idx;
}
}
// NOTE else?
bound_x_sorted_idx = node->left_x_cascading_map[bound_x_sorted_idx];
node = node->left;
} else {
bound_x_sorted_idx = node->right_x_cascading_map[bound_x_sorted_idx];
node = node->right;
}
}
// NOTE
// if(closest_right_idx == -1){
// }
return closest_right_idx;
}
int QueryLeft(int qx, int qy) const {
Node* node = root;
int bound_x_sorted_idx = UpperBound(x_sorted_idx, qx) - 1;
int closest_left_idx = -1;
while (node->left != nullptr && node->right != nullptr) {
// std::cout << "----------------" << std::endl;
// std::cout << "y med: " << node->y_med << std::endl;
// std::cout << "lower_bound idx: " << bound_x_sorted_idx << std::endl;
// std::cout << "x_sorted_idx : \n\t";
// for (const auto& idx : node->x_sorted_idx) {
// std::cout << idx << " ";
// }
// std::cout << std::endl;
// std::cout << "left_cascading_map_inverse : \n\t";
// for (const auto& cascading_idx : node->left_x_cascading_map_inverse) {
// std::cout << cascading_idx << " ";
// }
// std::cout << std::endl;
// std::cout << "left->x_sorted_idx : \n\t";
// for (const auto& idx : node->left->x_sorted_idx) {
// std::cout << idx << " ";
// }
// std::cout << std::endl;
// std::cout << "right_cascading_map_inverse : \n\t";
// for (const auto& cascading_idx : node->right_x_cascading_map_inverse) {
// std::cout << cascading_idx << " ";
// }
// std::cout << std::endl;
// std::cout << "right->x_sorted_idx : \n\t";
// for (const auto& idx : node->right->x_sorted_idx) {
// std::cout << idx << " ";
// }
// std::cout << std::endl;
// std::cout << "left 1, right 0 : " << (qy <= node->y_med) << std::endl;
// std::cout << "closest_left_idx : " << closest_left_idx << std::endl;
if (bound_x_sorted_idx < 0) {
break;
}
// NOTE
// qy 랑 같은 y 에 멈출지 말지? (output sensitive 관련)
if (qy < node->y_med) {
int found_higher_x_sorted_idx =
node->right_x_cascading_map_inverse[bound_x_sorted_idx];
if (found_higher_x_sorted_idx >= 0) {
int found_higher_idx =
node->right->x_sorted_idx[found_higher_x_sorted_idx];
if (closest_left_idx == -1) {
closest_left_idx = found_higher_idx;
} else if (pts[found_higher_idx][0] > pts[closest_left_idx][0]) {
closest_left_idx = found_higher_idx;
}
}
// NOTE else?
bound_x_sorted_idx =
node->left_x_cascading_map_inverse[bound_x_sorted_idx];
node = node->left;
} else {
bound_x_sorted_idx =
node->right_x_cascading_map_inverse[bound_x_sorted_idx];
node = node->right;
}
}
// NOTE
// last node consideration?
if (node->left == nullptr && node->right == nullptr) {
if (pts[node->x_sorted_idx[0]][0] <= qx &&
pts[node->x_sorted_idx[0]][1] >= qy) {
if \(closest\_left\_idx == -1 \||
pts[node->x_sorted_idx[0]][0] > pts[closest_left_idx][0]) {
closest_left_idx = node->x_sorted_idx[0];
}
}
}
return closest_left_idx;
}
// x_sorted_idx -> evaluation -> upperbound -> idx
int UpperBound(const std::vector<int>& x_sorted_idx_, int qx) const {
int l = 0;
// not containing end r
int r = x_sorted_idx_.size();
while (l < r) {
int med_idx = (l + r) / 2;
int med = pts[x_sorted_idx_[med_idx]][0];
if (med <= qx) {
l = med_idx + 1;
} else {
r = med_idx;
}
}
return l;
}
// x_sorted_idx -> evaluation -> lowerbound -> idx
int LowerBound(const std::vector<int>& x_sorted_idx_, int qx) const {
int l = 0;
// not containing end r
int r = x_sorted_idx_.size();
while (l < r) {
int med_idx = (l + r) / 2;
int med = pts[x_sorted_idx_[med_idx]][0];
if (med < qx) {
l = med_idx + 1;
} else {
r = med_idx;
}
}
return l;
}
};
class Solution {
public:
// using output-sensitive solution
std::vector<std::vector<int>> getSkyline(
std::vector<std::vector<int>>& buildings) {
std::chrono::high_resolution_clock::time_point begin;
std::chrono::high_resolution_clock::time_point end;
std::vector<std::vector<int>> new_buildings;
begin = std::chrono::high_resolution_clock::now();
new_buildings = PreprocessBuildings(buildings);
end = std::chrono::high_resolution_clock::now();
std::cout << "# preprocess : "
<< std::chrono::duration_cast<std::chrono::milliseconds>(end -
begin)
.count()
<< std::endl;
int n = new_buildings.size();
// starting at 4 too slow
int h_cnt = 2;
int h_star = 2;
// 2, 4, 16, 256 , ...
std::vector<std::vector<int>> ans;
while (1) {
h_star = (1 << (1 << h_cnt++));
std::vector<std::vector<int>> skyline;
int k = n / h_star;
if (h_star * k < n) {
k++;
}
//
// std::cout << "----- Skyline ----- [ h*: " << h_star << ", k: " << k
// << " ]" << std::endl;
begin = std::chrono::high_resolution_clock::now();
std::vector<std::vector<std::vector<int>>> subgp_buildings(k);
for (int i = 0; i < n; i++) {
int subgp_idx = i / h_star;
subgp_buildings[subgp_idx].push_back(new_buildings[i]);
}
std::vector<std::vector<std::vector<int>>> subgp_skylines;
subgp_skylines.reserve(k);
for (int i = 0; i < k; i++) {
std::chrono::high_resolution_clock::time_point b =
std::chrono::high_resolution_clock::now();
subgp_skylines.emplace_back(GetSkylineSlow(subgp_buildings[i]));
std::chrono::high_resolution_clock::time_point e =
std::chrono::high_resolution_clock::now();
// std::cout << "# subgp each skyline : " <<
// std::chrono::duration_cast<std::chrono::milliseconds>(e - b).count()
// << std::endl; std::cout << "skyline for subgp " << i << std::endl;
// for (const auto& pt : subgp_skylines[i]) {
// std::cout << "(" << pt[0] << ", " << pt[1] << ") - ";
// }
// std::cout << std::endl;
}
if (k == 1) {
return subgp_skylines[0];
}
end = std::chrono::high_resolution_clock::now();
std::cout << "# subgp skyline [" << h_star << ", " << k << "]: "
<< std::chrono::duration_cast<std::chrono::milliseconds>(end -
begin)
.count()
<< std::endl;
begin = std::chrono::high_resolution_clock::now();
std::vector<Tree> subgp_trees;
subgp_trees.reserve(k);
int sum_td1 = 0, sum_td2 = 0, sum_td3 = 0, sum_td4 = 0, sum_td5 = 0,
sum_td6 = 0;
for (int i = 0; i < k; i++) {
subgp_trees.emplace_back(subgp_skylines[i]);
sum_td1 += subgp_trees.back().td1;
sum_td2 += subgp_trees.back().td2;
sum_td3 += subgp_trees.back().td3;
sum_td4 += subgp_trees.back().td4;
sum_td5 += subgp_trees.back().td5;
sum_td6 += subgp_trees.back().td6;
}
end = std::chrono::high_resolution_clock::now();
std::cout << "# tree construction : "
<< std::chrono::duration_cast<std::chrono::milliseconds>(end -
begin)
.count()
<< std::endl;
// std::cout << "# tree construction td1: " << sum_td1 << std::endl;
// std::cout << "# tree construction td2: " << sum_td2 << std::endl;
// std::cout << "# tree construction td3: " << sum_td3 << std::endl;
// std::cout << "# tree construction td4: " << sum_td4 << std::endl;
// std::cout << "# tree construction td5: " << sum_td5 << std::endl;
// std::cout << "# tree construction td6: " << sum_td6 << std::endl;
// merge
int cur_x = 0;
int cur_y = 0;
int cur_subgp_idx = -1;
int cur_subgp_pt_idx = -1;
bool succeeded = false;
// from start point, h_start + 1 iteration needed
for (int i = 0; i <= h_star; i++) {
begin = std::chrono::high_resolution_clock::now();
// std::cout << "- h* loop : " << i << " / " << h_star << std::endl;
// std::cout << "cur_x: " << cur_x << std::endl
// << "cur_y: " << cur_y << std::endl
// << "cur_subgp_idx: " << cur_subgp_idx << std::endl
// << "cur_subgp_pt_idx: " << cur_subgp_pt_idx << std::endl;
int next_x, next_y, next_subgp_idx, next_subgp_pt_idx;
std::tie(next_x, next_y, next_subgp_idx, next_subgp_pt_idx) =
FindNextSkylinePt(subgp_trees, cur_x, cur_y);
// std::cout << "next_x: " << next_x << std::endl
// << "next_y: " << next_y << std::endl
// << "next_subgp_idx: " << next_subgp_idx << std::endl
// << "next_subgp_pt_idx: " << next_subgp_pt_idx << std::endl;
// std::cout
// << "Query next response: "
// << \(cur\_subgp\_idx == -1 \||
// cur_subgp_pt_idx < subgp_trees[cur_subgp_idx].pts.size() - 1)
// << \(next\_x == -1 \||
// (cur_subgp_idx != -1 &&
// next_x >
// subgp_trees[cur_subgp_idx].pts[cur_subgp_pt_idx +
// 1][0]))
// << std::endl;
if \(cur\_subgp\_idx == -1 \||
cur_subgp_pt_idx < subgp_trees[cur_subgp_idx].pts.size() - 1) {
// next subgp pt exists
if \(next\_x == -1 \||
(cur_subgp_idx != -1 &&
next_x >
subgp_trees[cur_subgp_idx].pts[cur_subgp_pt_idx + 1][0])) {
// no query response
// if cur_subgp_idx == -1 (init), it must jump
// to be drop case, next_x must be farther than the cur next x
// drop to cur_subgp_idx+1 and need to find y
// assert idx not -1 if no query resp
int cur_next_x =
subgp_trees[cur_subgp_idx].pts[cur_subgp_pt_idx + 1][0];
int cur_next_y =
subgp_trees[cur_subgp_idx].pts[cur_subgp_pt_idx + 1][1];
int prev_x, prev_y, prev_subgp_idx, prev_subgp_pt_idx;
// std::cout << "Query prev: (" << cur_next_x << ", " << cur_next_y
// << ")" << std::endl;
// NOTE: query y?
std::tie(prev_x, prev_y, prev_subgp_idx, prev_subgp_pt_idx) =
FindPrevSkylinePt(subgp_trees, cur_next_x, 0, cur_subgp_idx);
// std::cout << "prev_x: " << prev_x << std::endl
// << "prev_y: " << prev_y << std::endl
// << "prev_subgp_idx: " << prev_subgp_idx << std::endl
// << "prev_subgp_pt_idx: " << prev_subgp_pt_idx
// << std::endl;
// drop to prev y only if it is higher than drop height in the same
// subgp
if (prev_y != -1 && prev_y > cur_next_y) {
cur_x = cur_next_x;
cur_y = prev_y;
cur_subgp_idx = prev_subgp_idx;
cur_subgp_pt_idx = prev_subgp_pt_idx;
} else {
// drop to current subgp next pt
cur_x = cur_next_x;
cur_y = cur_next_y;
cur_subgp_pt_idx = cur_subgp_pt_idx + 1;
}
} else {
// jump (move to the query response)
// including cur subgp.
cur_x = next_x;
cur_y = next_y;
cur_subgp_idx = next_subgp_idx;
cur_subgp_pt_idx = next_subgp_pt_idx;
}
} else {
// else pt is the last (0,0) of the subgp
if (next_x == -1) {
// no query response
succeeded = true;
break;
} else {
// jump (move to the query response)
cur_x = next_x;
cur_y = next_y;
cur_subgp_idx = next_subgp_idx;
cur_subgp_pt_idx = next_subgp_pt_idx;
}
}
// std::cout << "-- skyline push : (" << cur_x << ", " << cur_y << ")"
// << std::endl;
skyline.push_back({cur_x, cur_y});
end = std::chrono::high_resolution_clock::now();
// std::cout << "# h* loop queary : " <<
// std::chrono::duration_cast<std::chrono::milliseconds>(end -
// begin).count() << std::endl;
}
if (succeeded) {
ans = skyline;
break;
} else {
; // std::cout << " - fail" << std::endl;
}
// h_star = h_star * h_star;
}
return ans;
}
std::tuple<int, int, int, int> FindNextSkylinePt(
const std::vector<Tree>& subgp_trees, int qx, int qy) const {
int next_x = -1;
int next_y = -1;
int next_subgp_idx = -1;
int next_subgp_pt_idx = -1;
for (int j = 0; j < subgp_trees.size(); j++) {
const auto& subgp_tree = subgp_trees[j];
int resp_idx = subgp_tree.QueryRight(qx, qy);
if (resp_idx > subgp_tree.pts.size()) {
continue;
}
int next_cand_x = subgp_tree.pts[resp_idx][0];
int next_cand_y = subgp_tree.pts[resp_idx][1];
if \(next\_x == -1 \|| std::pair<int, int>\(next\_x, -next\_y) >
std::pair<int, int>(next_cand_x, -next_cand_y)) {
next_x = next_cand_x;
next_y = next_cand_y;
next_subgp_idx = j;
next_subgp_pt_idx = resp_idx;
}
}
return std::make_tuple(next_x, next_y, next_subgp_idx, next_subgp_pt_idx);
}
// regardless x , find highest y value dominating query pt
// return highest except cur subgp
std::tuple<int, int, int, int> FindPrevSkylinePt(
const std::vector<Tree>& subgp_trees, int qx, int qy,
int cur_subgp_idx) const {
int prev_x = -1;
int prev_y = -1;
int prev_subgp_idx = -1;
int prev_subgp_pt_idx = -1;
for (int j = 0; j < subgp_trees.size(); j++) {
if (j == cur_subgp_idx) {
continue;
}
const auto& subgp_tree = subgp_trees[j];
int resp_idx = subgp_tree.QueryLeft(qx, qy);
if (resp_idx > subgp_tree.pts.size()) {
continue;
}
int prev_cand_x = subgp_tree.pts[resp_idx][0];
int prev_cand_y = subgp_tree.pts[resp_idx][1];
if \(prev\_x == -1 \|| prev\_y < prev\_cand\_y) {
prev_x = prev_cand_x;
prev_y = prev_cand_y;
prev_subgp_idx = j;
prev_subgp_pt_idx = resp_idx;
}
}
return std::make_tuple(prev_x, prev_y, prev_subgp_idx, prev_subgp_pt_idx);
}
// find skyline given building segments in O(n log n)
std::vector<std::vector<int>> GetSkylineSlow(
std::vector<std::vector<int>>& buildings) {
std::vector<std::vector<int>> skyline;
skyline.reserve(buildings.size() * 2);
std::vector<std::pair<int, int>> segs;
segs.reserve(buildings.size());
for (int i = 0; i < buildings.size(); i++) {
const auto& b = buildings[i];
segs.push_back({b[0], i});
segs.push_back({b[1], i});
}
std::sort(segs.begin(), segs.end());
std::priority_queue<std::pair<int, int>> pq;
int seg_idx = 0;
while (seg_idx < segs.size()) {
int cur_x;
std::tie(cur_x, std::ignore) = segs[seg_idx];
while (seg_idx < segs.size() && cur_x == segs[seg_idx].first) {
int building_idx;
std::tie(std::ignore, building_idx) = segs[seg_idx];
const auto& b = buildings[building_idx];
if (b[0] == cur_x) {
pq.push({b[2], b[1]});
// pq.emplace(b[2], b[1]);
}
seg_idx++;
}
// remove immediately as it ends
while (!pq.empty() && pq.top().second <= cur_x) {
pq.pop();
}
int cur_height = 0;
if (!pq.empty()) {
cur_height = pq.top().first;
}
if \(skyline.empty\() \|| skyline.back\()\[1] != cur\_height) {
skyline.push_back({cur_x, cur_height});
}
}
return skyline;
}
// remove same height connected buildings
std::vector<std::vector<int>> PreprocessBuildings(
std::vector<std::vector<int>>& buildings) {
std::unordered_map<int, int> um;
std::vector<std::vector<int>> new_buildings;
new_buildings.reserve(buildings.size());
int idx = 0;
for (const auto& b : buildings) {
if (um.find(b[2]) == um.end()) {
new_buildings.push_back(b);
um[b[2]] = idx++;
} else {
// assert um[b[2]] not empty
auto& last_b = new_buildings[um[b[2]]];
// intersects
if (last_b[1] >= b[0]) {
if (last_b[1] < b[1]) {
last_b[1] = b[1];
}
// contained
} else {
// separated
new_buildings.push_back(b);
um[b[2]] = idx++;
}
}
}
return new_buildings;
}
void TestTree() {
std::cout << "===== TestTree =====" << std::endl;
std::vector<std::vector<int>> pts = {
{2, 10}, {3, 15}, {5, 12}, {15, 10}, {19, 8}};
Tree t(pts);
}
void TestQuery() {
std::cout << "===== TestQuery =====" << std::endl;
std::vector<std::vector<int>> pts = {
{10, 10}, {8, 15}, {6, 12}, {6, 10},
{6, 8}, {4, 8}, {2, 8}};
Tree t(pts);
std::vector<int> test_list = {6, 5, 4, 3, 2, 1, 0};
int i;
i = t.LowerBound(test_list, 5);
std::cout << "test lowerbound for 5 : " << i << std::endl;
i = t.LowerBound(test_list, 6);
std::cout << "test lowerbound for 6 : " << i << std::endl;
i = t.LowerBound(test_list, 7);
std::cout << "test lowerbound for 7 : " << i << std::endl;
i = t.LowerBound(test_list, 0);
std::cout << "test lowerbound for 0 : " << i << std::endl;
i = t.LowerBound(test_list, 11);
std::cout << "test lowerbound for 11 : " << i << std::endl;
i = t.UpperBound(test_list, 5);
std::cout << "test upperbound for 5 : " << i << std::endl;
i = t.UpperBound(test_list, 6);
std::cout << "test upperbound for 6 : " << i << std::endl;
i = t.UpperBound(test_list, 7);
std::cout << "test upperbound for 7 : " << i << std::endl;
i = t.UpperBound(test_list, 0);
std::cout << "test upperbound for 0 : " << i << std::endl;
i = t.UpperBound(test_list, 11);
std::cout << "test upperbound for 11 : " << i << std::endl;
}
void TestQuery2() {
std::cout << "===== TestQuery2 =====" << std::endl;
std::vector<std::vector<int>> pts = {
{2, 14}, {4, 26}, {6, 8}, {8, 4}, {10, 12}, {12, 6}, {14, 20},
{16, 10}, {18, 2}, {20, 18}, {22, 24}, {24, 16}, {26, 22}, {28, 28}};
Tree t(pts);
std::cout << "pts : " << std::endl;
for (const auto& pt : pts) {
std::cout << "(" << pt[0] << ", " << pt[1] << ") - ";
}
std::cout << std::endl;
std::cout << "y_order : " << std::endl;
for (const auto& idx : t.x_sorted_idx) {
std::cout << t.idx_to_y_order[idx] << " ";
}
std::cout << std::endl;
std::vector<std::vector<int>> qs = {
{9, 5}, {9, 13}, {11, 5}, {11, 13},
{9, 27}, {9, 28}, {29, 1}, {28, 1},
{0, 14}, {0, 15}, {15, 1}, {19, 18}};
for (int i = 0; i < qs.size(); i++) {
std::cout << "Query : (" << qs[i][0] << ", " << qs[i][1]
<< ") : " << std::endl;
int qidx = t.QueryRight(qs[i][0], qs[i][1]);
if (qidx != -1) {
std::cout << qidx << " => "
<< "(" << pts[qidx][0] << ", " << pts[qidx][1] << ")"
<< std::endl;
} else {
std::cout << qidx << " => not found" << std::endl;
}
}
}
void TestQuery3() {
std::cout << "===== TestQuery3 =====" << std::endl;
std::vector<std::vector<int>> pts = {
{2, 14}, {4, 26}, {6, 8}, {8, 4},
{10, 12}, {12, 6}, {14, 20}, {16, 10},
{18, 2}, {20, 18}, {22, 24}, {24, 16},
{26, 22}, {28, 28}, {30, 0}};
Tree t(pts);
std::cout << "pts : " << std::endl;
for (const auto& pt : pts) {
std::cout << "(" << pt[0] << ", " << pt[1] << ") - ";
}
std::cout << std::endl;
std::cout << "y_order : " << std::endl;
for (const auto& idx : t.x_sorted_idx) {
std::cout << t.idx_to_y_order[idx] << " ";
}
std::cout << std::endl;
std::vector<std::vector<int>> qs = {
{9, 5}, {9, 13}, {11, 5}, {11, 13},
{9, 27}, {9, 28}, {29, 1}, {28, 1},
{0, 14}, {0, 15}, {15, 1}, {19, 18},
{28, 28}, {2, 14}, {26, 22}, {31, 0}};
for (int i = 0; i < qs.size(); i++) {
std::cout << "Query : (" << qs[i][0] << ", " << qs[i][1]
<< ") : " << std::endl;
int qidx = t.QueryLeft(qs[i][0], qs[i][1]);
if (qidx != -1) {
std::cout << qidx << " => "
<< "(" << pts[qidx][0] << ", " << pts[qidx][1] << ")"
<< std::endl;
} else {
std::cout << qidx << " => not found" << std::endl;
}
}
}
void TestSlow() {
std::cout << "===== TestSlow =====" << std::endl;
std::vector<std::vector<int>> buildings = {
{2, 9, 10}, {3, 7, 15}, {5, 12, 12}, {15, 20, 10}, {19, 24, 8}};
std::vector<std::vector<int>> ans;
ans = GetSkylineSlow(buildings);
for (const auto& pt : ans) {
std::cout << "(" << pt[0] << ", " << pt[1] << ") - ";
}
std::cout << std::endl;
}
void TestSlow2() {
std::cout << "===== TestSlow2 =====" << std::endl;
std::vector<std::vector<int>> buildings;
int n = 10;
for (int i = 1; i <= n; i++) {
buildings.push_back({i, 2 * n - i + 1, i});
}
std::vector<std::vector<int>> ans;
ans = GetSkylineSlow(buildings);
for (const auto& pt : ans) {
std::cout << "(" << pt[0] << ", " << pt[1] << ") - ";
}
std::cout << std::endl;
}
void TestSlow3() {
std::cout << "===== TestSlow3 =====" << std::endl;
std::vector<std::vector<int>> buildings;
int n = 30;
for (int i = 1; i <= n; i++) {
if (i % 3 != 0) {
buildings.push_back({i, i + 1, 2});
}
}
std::vector<std::vector<int>> ans;
ans = GetSkylineSlow(buildings);
for (const auto& pt : ans) {
std::cout << "(" << pt[0] << ", " << pt[1] << ") - ";
}
std::cout << std::endl;
}
void TestSkyline() {
std::cout << "===== TestSkyline =====" << std::endl;
std::vector<std::vector<int>> buildings = {
{2, 9, 10}, {3, 7, 15}, {5, 12, 12}, {15, 20, 10}, {19, 24, 8}};
std::vector<std::vector<int>> ans;
ans = getSkyline(buildings);
for (const auto& pt : ans) {
std::cout << "(" << pt[0] << ", " << pt[1] << ") - ";
}
std::cout << std::endl;
}
void TestSkyline2() {
std::cout << "===== TestSkyline2 =====" << std::endl;
std::vector<std::vector<int>> buildings;
int n = 100;
for (int i = 1; i <= n; i++) {
buildings.push_back({i + 1, 2 * n - i + 2, i});
}
buildings.push_back({1, 202, 101});
std::vector<std::vector<int>> ans;
ans = getSkyline(buildings);
std::cout << "----- Result -----" << std::endl;
for (const auto& pt : ans) {
std::cout << "(" << pt[0] << ", " << pt[1] << ") - ";
}
std::cout << std::endl;
}
void TestSkyline3() {
std::cout << "===== TestSkyline3 =====" << std::endl;
std::vector<std::vector<int>> buildings;
int n = 30;
for (int i = 1; i <= n; i++) {
if (i % 3 != 0) {
buildings.push_back({i, i + 1, 2});
}
}
std::vector<std::vector<int>> ans;
ans = getSkyline(buildings);
std::cout << "----- Result -----" << std::endl;
for (const auto& pt : ans) {
std::cout << "(" << pt[0] << ", " << pt[1] << ") - ";
}
std::cout << std::endl;
}
void TestSkyline4() {
std::cout << "===== TestSkyline4 =====" << std::endl;
std::vector<std::vector<int>> buildings = {
{1, 2, 1}, {1, 2, 2}, {1, 2, 3},
{2, 3, 1}, {2, 3, 2}, {2, 3, 3}};
std::vector<std::vector<int>> ans;
ans = getSkyline(buildings);
std::cout << "----- Result -----" << std::endl;
for (const auto& pt : ans) {
std::cout << "(" << pt[0] << ", " << pt[1] << ") - ";
}
std::cout << std::endl;
}
void TestSkyline5() {
std::cout << "===== TestSkyline5 =====" << std::endl;
std::vector<std::vector<int>> buildings = {
{1, 38, 219}, {2, 19, 228}, {2, 64, 106}, {3, 80, 65},
{3, 84, 8}, {4, 12, 8}, {4, 25, 14}, {4, 46, 225},
{4, 67, 187}, {5, 36, 118}, {5, 48, 211}, {5, 55, 97},
{6, 42, 92}, {6, 56, 188}, {7, 37, 42}, {7, 49, 78},
{7, 84, 163}, {8, 44, 212}, {9, 42, 125}, {9, 85, 200},
{9, 100, 74}, {10, 13, 58}, {11, 30, 179}, {12, 32, 215},
{12, 33, 161}, {12, 61, 198}, {13, 38, 48}, {13, 65, 222},
{14, 22, 1}, {15, 70, 222}, {16, 19, 196}, {16, 24, 142},
{16, 25, 176}, {16, 57, 114}, {18, 45, 1}, {19, 79, 149},
{20, 33, 53}, {21, 29, 41}, {23, 77, 43}, {24, 41, 75},
{24, 94, 20}, {27, 63, 2}, {31, 69, 58}, {31, 88, 123},
{31, 88, 146}, {33, 61, 27}, {35, 62, 190}, {35, 81, 116},
{37, 97, 81}, {38, 78, 99}, {39, 51, 125}, {39, 98, 144},
{40, 95, 4}, {45, 89, 229}, {47, 49, 10}, {47, 99, 152},
{48, 67, 69}, {48, 72, 1}, {49, 73, 204}, {49, 77, 117},
{50, 61, 174}, {50, 76, 147}, {52, 64, 4}, {52, 89, 84},
{54, 70, 201}, {57, 76, 47}, {58, 61, 215}, {58, 98, 57},
{61, 95, 190}, {66, 71, 34}, {66, 99, 53}, {67, 74, 9},
{68, 97, 175}, {70, 88, 131}, {74, 77, 155}, {74, 99, 145},
{76, 88, 26}, {82, 87, 40}, {83, 84, 132}, {88, 99, 99}};
std::vector<std::vector<int>> ans;
ans = getSkyline(buildings);
std::cout << "----- Result -----" << std::endl;
for (const auto& pt : ans) {
std::cout << "[" << pt[0] << ", " << pt[1] << "], ";
}
std::cout << std::endl;
}
void TestSkyline6() {
std::cout << "===== TestSkyline6 =====" << std::endl;
std::ifstream infile("test_input");
std::vector<std::vector<int>> buildings;
int x1, x2, y;
while (!infile.eof()) {
infile >> x1 >> x2 >> y;
buildings.push_back({x1, x2, y});
}
std::cout << "input length: " << buildings.size() << std::endl;
std::vector<std::vector<int>> ans;
ans = getSkyline(buildings);
std::cout << "----- Result -----" << std::endl;
for (const auto& pt : ans) {
std::cout << "[" << pt[0] << ", " << pt[1] << "], ";
}
std::cout << std::endl;
}
std::vector<std::vector<int>> GenerateRandomInput(int n, std::mt19937& gen) {
std::uniform_int_distribution<int> dist_x(1, 1 << 20);
std::uniform_int_distribution<int> dist_y(1, 1 << 20);
std::vector<std::vector<int>> buildings(n);
for (int i = 0; i < n; i++) {
int x1, x2, y;
x1 = dist_x(gen);
x2 = dist_x(gen);
y = dist_y(gen);
if (x1 > x2) {
int tmp = x1;
x1 = x2;
x2 = tmp;
} else if (x1 == x2) {
x2 = x1 + 1;
}
buildings[i] = {x1, x2, y};
}
std::sort(buildings.begin(), buildings.end());
return buildings;
}
void ProfileTC() {
int repetition = 2;
std::random_device rd;
std::mt19937 gen(1234); // rd()
std::stringstream ss;
std::ofstream outfile("profile");
int scale = 20000000;
for (int n = scale; n <= scale * 1; n = n + scale / 2) {
for (int i = 0; i < repetition; i++) {
std::vector<std::vector<int>> buildings = GenerateRandomInput(n, gen);
std::chrono::high_resolution_clock::time_point begin;
std::chrono::high_resolution_clock::time_point end;
std::vector<std::vector<int>> ans;
begin = std::chrono::high_resolution_clock::now();
ans = GetSkylineSlow(buildings);
end = std::chrono::high_resolution_clock::now();
int h1 = ans.size();
auto time_ms1 =
std::chrono::duration_cast<std::chrono::milliseconds>(end - begin)
.count();
begin = std::chrono::high_resolution_clock::now();
ans = getSkyline(buildings);
end = std::chrono::high_resolution_clock::now();
int h2 = ans.size();
auto time_ms2 =
std::chrono::duration_cast<std::chrono::milliseconds>(end - begin)
.count();
int h = -1;
if (h1 == h2) {
h = h1;
} else {
outfile << "----- Error ----- : " << h1 << " vs " << h2 << std::endl;
for (const auto& b : buildings) {
outfile << b[0] << " " << b[1] << " " << b[2] << std::endl;
}
return;
}
outfile << n << " " << h << " " << time_ms1 << " " << time_ms2
<< std::endl;
}
}
// outfile << ss.rdbuf();
}
};
int main() {
Solution s;
// s.TestTree();
// s.TestQuery();
// s.TestQuery2();
// s.TestQuery3();
// s.TestSlow();
// s.TestSlow2();
// s.TestSlow3();
// s.TestSkyline();
// s.TestSkyline2();
// s.TestSkyline3();
// s.TestSkyline4();
// s.TestSkyline5();
// s.TestSkyline6();
s.ProfileTC();
return 0;
}시각화 코드
import matplotlib.pyplot as plt
from matplotlib.patches import Rectangle
import numpy as np
# 10^4
def generate_random_case(n):
# buildings = [[1,2**5, 2**5]]
buildings = []
x_max = 2 ** 10
y_max = 2 ** 10
for i in range(n):
x1, x2, y = np.random.randint(1, [x_max, x_max, y_max])
if x1 > x2:
x1,x2 = x2, x1
elif x1 == x2:
x2 = x2+1
buildings.append([x1, x2, y])
buildings = sorted(buildings)
return buildings
if __name__ == "__main__":
np.random.seed(2)
fig, ax = plt.subplots()
# buildings = [[1,38,219],[2,19,228],[2,64,106],[3,80,65],[3,84,8],[4,12,8],[4,25,14],[4,46,225],[4,67,187],[5,36,118],[5,48,211],[5,55,97],[6,42,92],[6,56,188],[7,37,42],[7,49,78],[7,84,163],[8,44,212],[9,42,125],[9,85,200],[9,100,74],[10,13,58],[11,30,179],[12,32,215],[12,33,161],[12,61,198],[13,38,48],[13,65,222],[14,22,1],[15,70,222],[16,19,196],[16,24,142],[16,25,176],[16,57,114],[18,45,1],[19,79,149],[20,33,53],[21,29,41],[23,77,43],[24,41,75],[24,94,20],[27,63,2],[31,69,58],[31,88,123],[31,88,146],[33,61,27],[35,62,190],[35,81,116],[37,97,81],[38,78,99],[39,51,125],[39,98,144],[40,95,4],[45,89,229],[47,49,10],[47,99,152],[48,67,69],[48,72,1],[49,73,204],[49,77,117],[50,61,174],[50,76,147],[52,64,4],[52,89,84],[54,70,201],[57,76,47],[58,61,215],[58,98,57],[61,95,190],[66,71,34],[66,99,53],[67,74,9],[68,97,175],[70,88,131],[74,77,155],[74,99,145],[76,88,26],[82,87,40],[83,84,132],[88,99,99]]
buildings = generate_random_case(20)
# print(buildings)
with open("test_input_py", "w", encoding="utf-8") as f:
f.write(str(buildings))
with open("test_input", "w", encoding="utf-8") as f:
for b in buildings:
f.write(f"{b[0]} {b[1]} {b[2]}\n")
print(len(buildings))
x_max = max([b[1] for b in buildings])
y_max = max([b[2] for b in buildings])
ax.set_xlim([-1, x_max*1.1])
ax.set_ylim([-1, y_max*1.1])
# ax.set_xticks(np.arange(-1, x_max, 100))
cmap = plt.cm.viridis
for b in buildings:
ax.add_patch(Rectangle((b[0], 0), b[1]-b[0], b[2],
fill=False,
lw=1,
color=cmap(np.random.rand(1))))
# ans = [[1, 219], [2, 228], [19, 225], [45, 229], [89, 190], [95, 175], [97, 152], [99, 74], [100, 0]]
ans = [[32, 451], [103, 773], [196, 494], [360, 1003], [551, 893], [562, 943], [808, 288], [832, 133], [973, 0]]
ans_x = [pt[0] for pt in ans]
ans_y = [pt[1] for pt in ans]
ax.scatter(ans_x, ans_y, c='red')
plt.show()